| We have defined static stability as the initial tendency
that the airplane displays after being disturbed from its trimmed
condition. Occasionally, the initial tendency is different or opposite
from the overall tendency, so we must distinguish between the two. Dynamic
stability is the overall tendency that the airplane displays after its
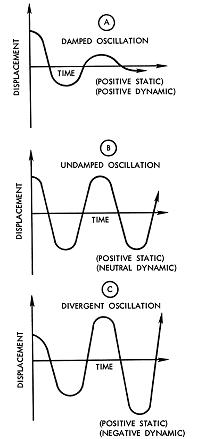
equilibrium is disturbed. The curves of Fig. 17-23 represent the variation
of controlled functions versus time. It is seen that the unit of time is
very significant. If the time unit for one cycle or oscillation is above
10 seconds' duration, it is called a "long period" oscillation (phugoid)
and is easily controlled. In a longitudinal phugoid oscillation, the angle
of attack remains constant when the airspeed increases and decreases. To a
certain degree a convergent phugoid is desirable but is not required. The
phugoid can be determined only on a statically stable airplane, and this
has a great effect on the trimming qualities of the airplane. If the time
unit for one cycle or oscillation is less than one or two seconds, it is
called a "short period" oscillation and is normally very difficult, if not
impossible, for the pilot to control. This is the type of oscillation that
the pilot can easily "get in phase with" and reinforce.
A neutral or divergent, short period oscillation is dangerous because
structural failure usually results if the oscillation is not damped
immediately. Short period oscillations affect airplane and control
surfaces alike and reveal themselves as "porpoising" in the airplane, or
as in "buzz" or "flutter" in the control surfaces. Basically, the short
period oscillation is a change in angle of attack with no change in
airspeed. A short period oscillation of a control surface is usually of
such high frequency that the airplane does not have time to react.
Logically, Federal Aviation Regulations require that short period
oscillations be heavily damped (i.e., die out immediately). Flight tests
during the airworthiness certification of airplanes are conducted for this
condition by inducing the oscillation in the controls for pitch roll, or
yaw at the most critical speed (i.e., at Vne, the never exceed speed). The
test pilot strikes the control wheel or rudder pedal a sharp blow and
observes the results. |
|
